Today, we’ll introduce one of the aerodynamic fundamentals of helicopter flight, hovering, with an excerpt from the Helicopter Flying Handbook (FAA-H-8083-21).
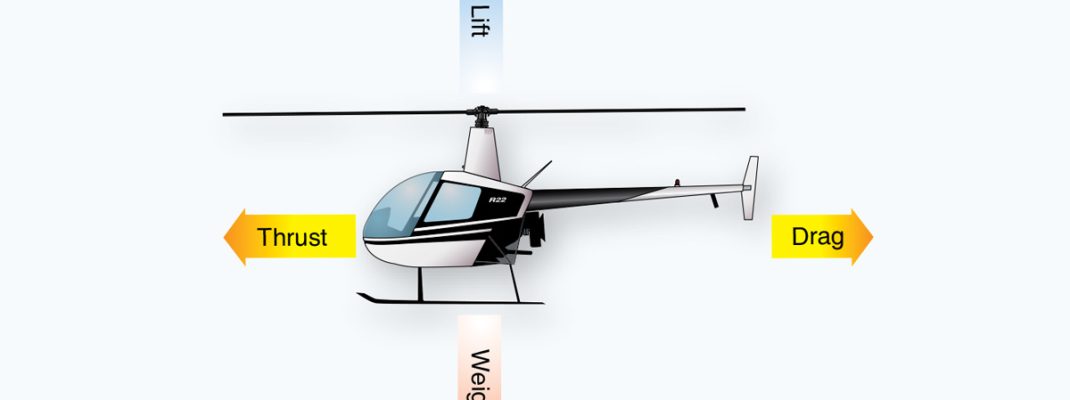
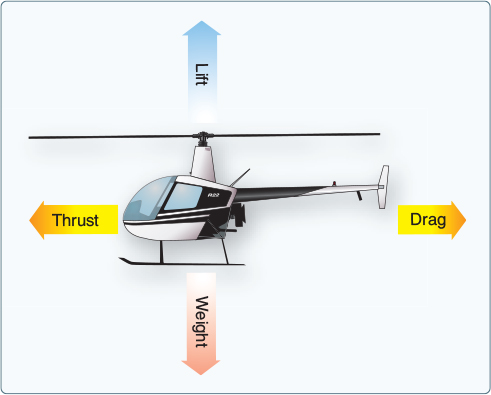
Hovering is the most challenging part of flying a helicopter. This is because a helicopter generates its own gusty air while in a hover, which acts against the fuselage and flight control surfaces. The end result is constant control inputs and corrections by the pilot to keep the helicopter where it is required to be. Despite the complexity of the task, the control inputs in a hover are simple. The cyclic is used to eliminate drift in the horizontal plane, controlling forward, backward, right and left movement or travel. The throttle, if not governor controlled, is used to control revolutions per minute (rpm). The collective is used to maintain altitude. The pedals are used to control nose direction or heading. It is the interaction of these controls that makes hovering difficult, since an adjustment in any one control requires an adjustment of the other two, creating a cycle of constant correction. During hovering flight, a helicopter maintains a constant position over a selected point, usually a few feet above the ground. The ability of the helicopter to hover comes from the both the lift component, which is the force developed by the main rotor(s) to overcome gravity and aircraft weight, and the thrust component, which acts horizontally to accelerate or decelerate the helicopter in the desired direction. Pilots direct the thrust of the rotor system by using the cyclic to change the tip-path plane as compared to the visible horizon to induce travel or compensate for the wind and hold a position. At a hover in a no-wind condition, all opposing forces (lift, thrust, drag, and weight) are in balance; they are equal and opposite. Therefore, lift and weight are equal, resulting in the helicopter remaining at a stationary hover.
While hovering, the amount of main rotor thrust can be changed to maintain the desired hovering altitude. This is done by changing the angle of incidence (by moving the collective) of the rotor blades and hence the angle of attack (AOA) of the main rotor blades. Changing the AOA changes the drag on the rotor blades, and the power delivered by the engine must change as well to keep the rotor speed constant.
The weight that must be supported is the total weight of the helicopter and its occupants. If the amount of lift is greater than the actual weight, the helicopter accelerates upwards until the lift force equals the weight gain altitude; if thrust is less than weight, the helicopter accelerates downward. When operating near the ground, the effects of the proximity to the surface change this response.
The drag of a hovering helicopter is mainly induced drag incurred while the blades are producing lift. There is, however, some profile drag on the blades as they rotate through the air and a small amount of parasite drag from the non-lift-producing surfaces of the helicopter, such as the rotor hub, cowlings, and landing gear. Throughout the rest of this discussion, the term “drag” includes induced, profile and parasite drag.
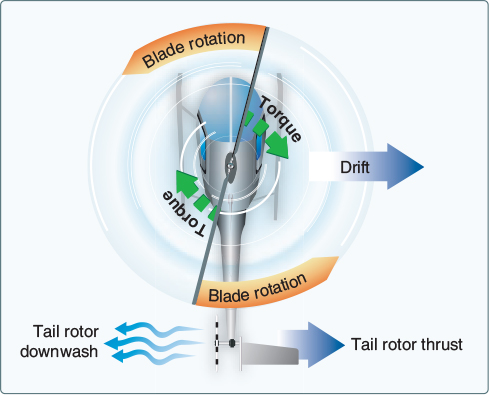
An important consequence of producing thrust is torque. Remember Newton’s Third Law: for every action there is an equal and opposite reaction. Therefore, as the engine turns the main rotor system in a counterclockwise direction, the helicopter fuselage wants to turn clockwise. The amount of torque is directly related to the amount of engine power being used to turn the main rotor system. Remember, as power changes, torque changes.
To counteract this torque-induced turning tendency, an antitorque rotor or tail rotor is incorporated into most helicopter designs. A pilot can vary the amount of thrust produced by the tail rotor in relation to the amount of torque produced by the engine. As the engine supplies more power to the main rotor, the tail rotor must produce more thrust to overcome the increased torque effect. This control change is accomplished through the use of antitorque pedals.